*本文只做阅读笔记分享*
一、引言
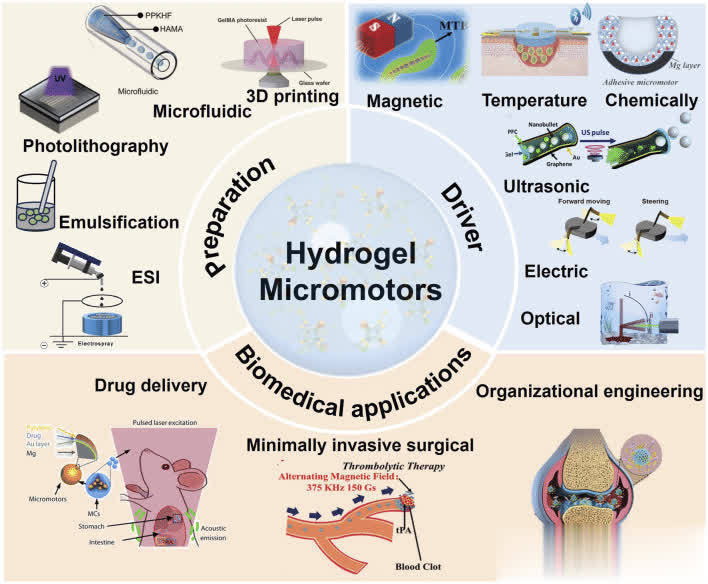
近年来,微型机器人在医学领域的发展取得了显著进展,水凝胶微型机器人因其独特优势备受关注。它们具有良好的生物相容性、可调节的物理力学性能以及对生物环境的敏锐感知能力,在靶向药物输送、伤口愈合、生物成像和精确手术干预等方面发挥着重要作用。
二、水凝胶微型机器人的发展历程
(一)早期发展
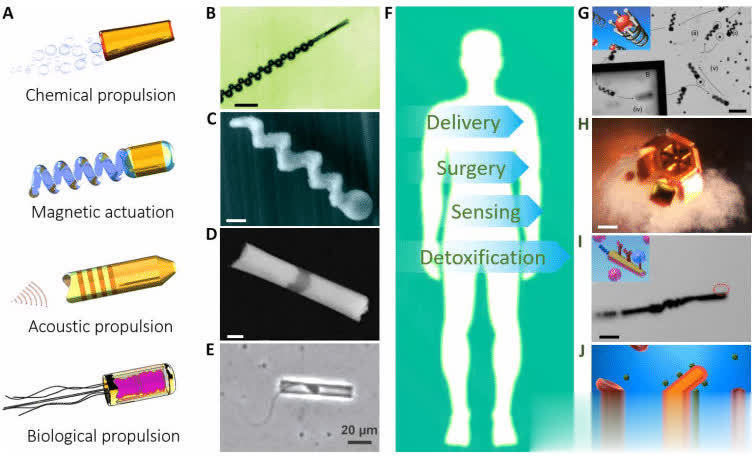
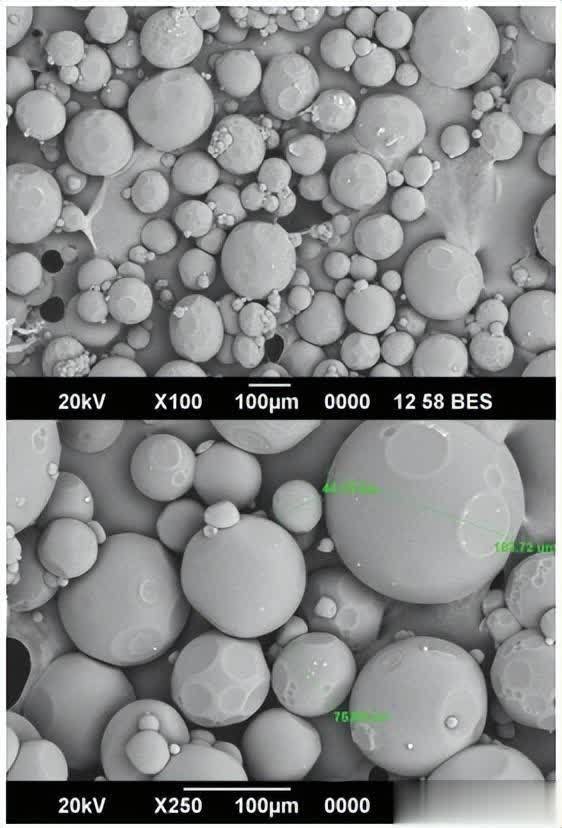
水凝胶微型机器人的早期发展侧重于赋予其基本的运动能力,例如利用磁场、光或超声等外部刺激进行推进。例如,药物封装的聚(乳酸-共-乙醇酸)(PLGA)磁性微球可在外部磁场的调制下进行旋转和线性运动。
(二)技术进步
随着技术的进步,研究重点转向水凝胶微型机器人对生物环境变化的智能响应能力,如pH值波动、温度变化以及对特定生物分子的识别。例如,一种可生物降解的水凝胶基微型游动器能够根据基质金属蛋白酶-2( MMP -2)酶浓度的变化,迅速扩张其内部水凝胶网络,从而释放封装的药物。
(三)进一步发展
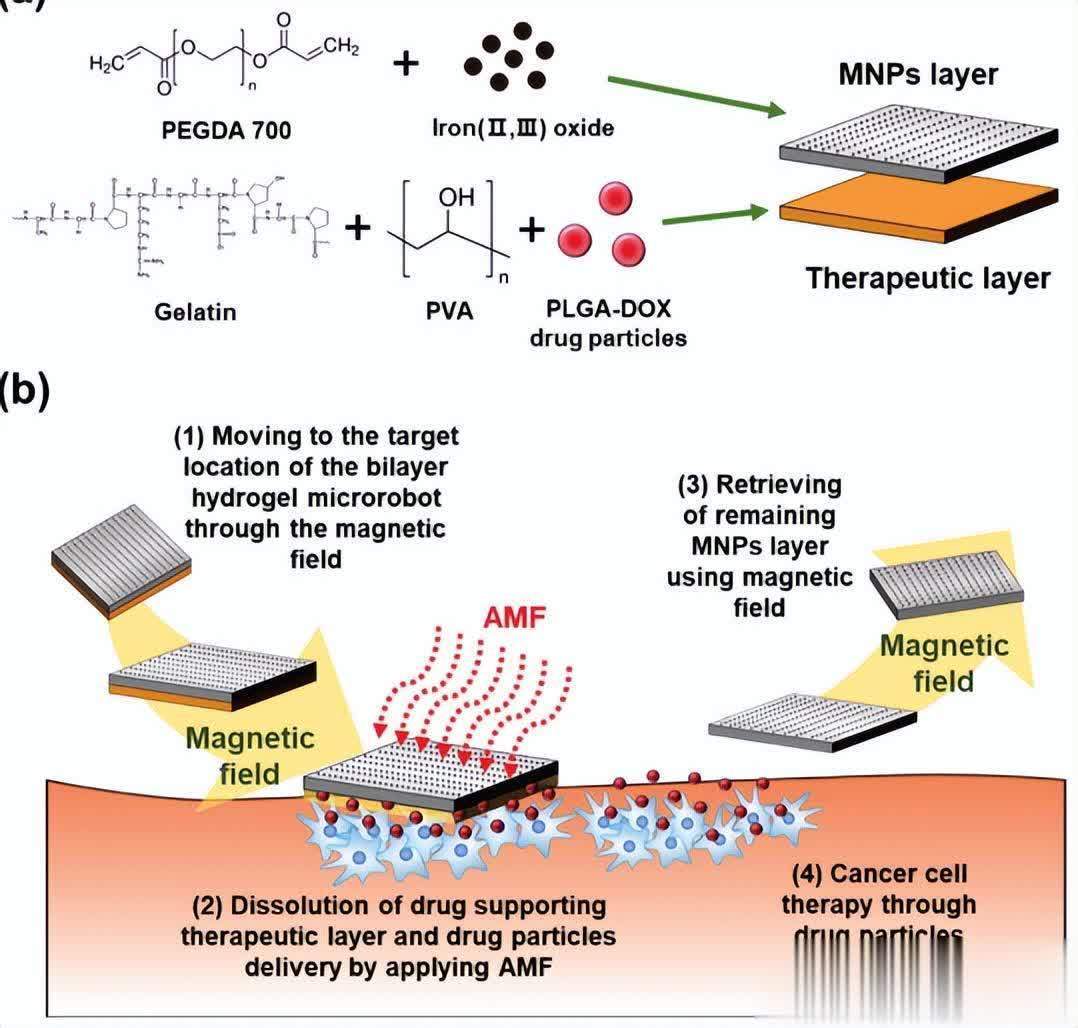
水凝胶微型机器人不断得到改进,能够在医疗场景中执行更复杂和精确的任务。如一种多功能医疗微型机器人系统,它不仅能够实现肝脏化疗栓塞,还能通过X射线和磁共振成像(MRI)进行实时和术后成像。该系统结合了带有水凝胶包裹的多孔结构和磁性纳米粒子的微型机器人,利用磁性导航精确靶向肿瘤供血血管,在生物体内直接应用经导管肝化疗。
三、水凝胶材料分类及特性
(一)基于来源分类
1、天然水凝胶
源自天然物质,具有出色的吸水能力和凝胶特性。例如,琼脂糖、透明质酸、海藻酸盐和壳聚糖等多糖类,以及纤维连接蛋白、丝胶蛋白、胶原蛋白和明胶等蛋白质类。这些天然水凝胶以其优异的生物相容性和生物降解性而著称。
2、合成水凝胶
由合成聚合物制成,能精确控制化学成分和机械性能。例如,聚乙烯醇(PVA)、聚乙二醇(PEG)和聚(N-乙烯基己内酰胺)(PNVCL)等。通过改变合成技术和材料组成,可以精细调整这些合成水凝胶材料的物理化学和功能属性,以满足特定应用需求。
(二)基于制备方法分类
1、物理交联水凝胶
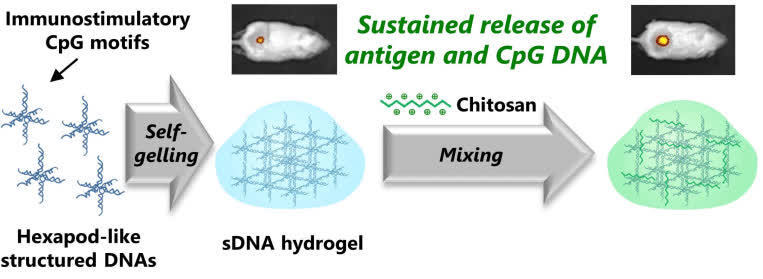
通过物理(氢键)键合、结晶、离子相互作用、小分子自组装和机械分散等多种机制形成凝胶结构。例如,透明质酸、壳聚糖等。这些水凝胶具有易获取、无需交联剂、可逆、生物相容性好且性能可调节的优点,适用于多种应用。
2、化学交联水凝胶
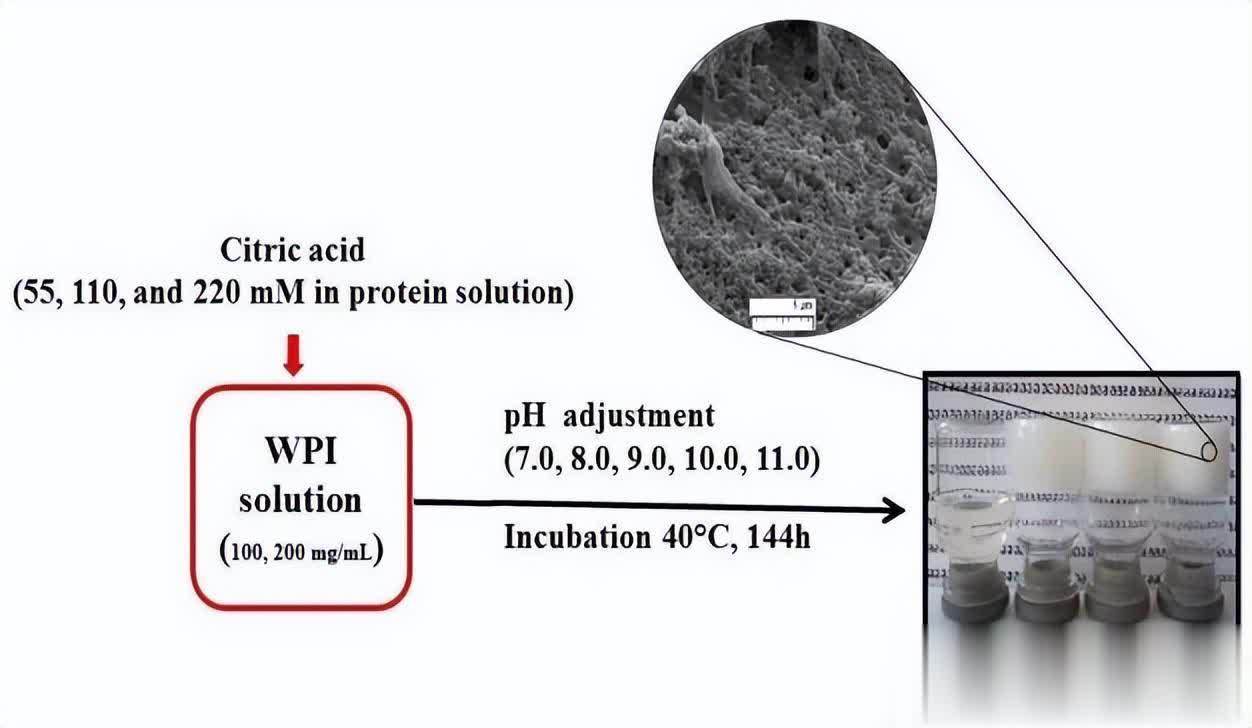
由聚合物链共价键合形成永久性网络结构,被称为不可逆凝胶。例如,乳清蛋白、Kolliphor和纤维素纳米纤维等。其制备过程涉及多种反应,如光聚合、酶促过程和点击化学等,确保形成坚固持久的凝胶框架。
(三)刺激响应性水凝胶
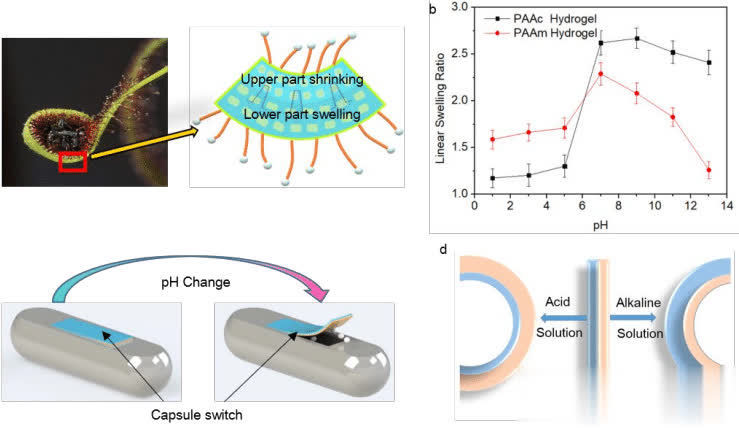
1、pH响应性水凝胶
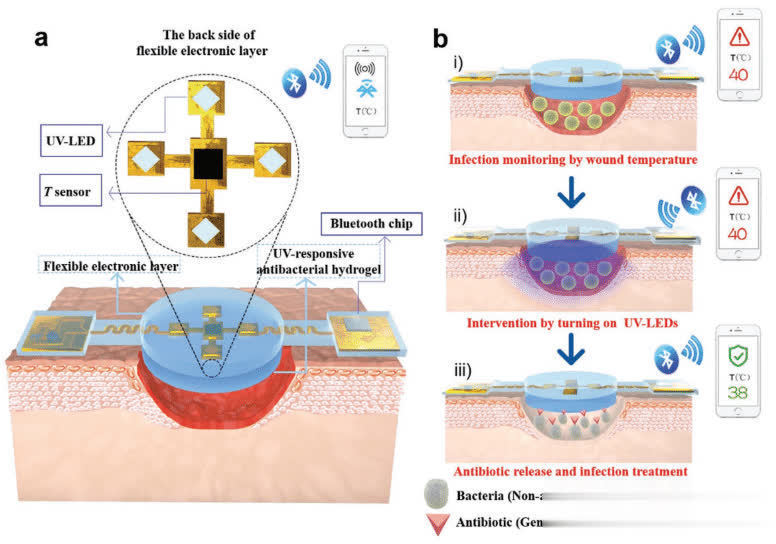
其结构和物理属性可根据环境pH值进行精细调整。例如,与4D激光打印技术结合的pH响应性水凝胶,可用于开发能够在精确位置进行靶向药物输送的磁性微型机器人。此外,还应用于多功能微针传感贴片,用于视觉监测伤口pH值。
2、温度响应性水凝胶
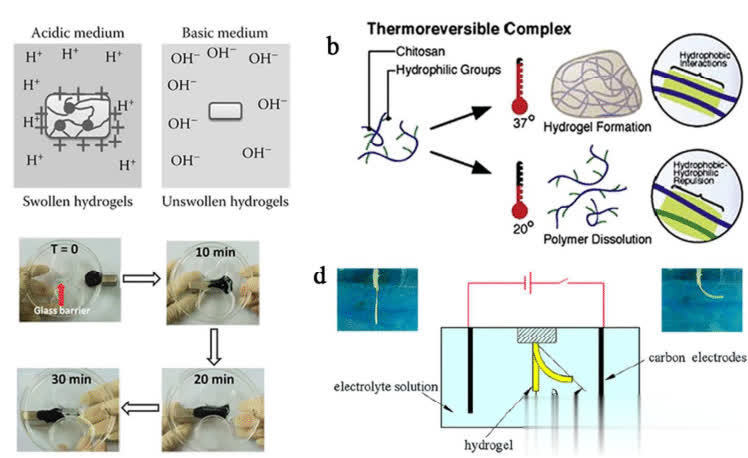
对温度波动具有响应性,在不同热条件下表现出可逆的膨胀和收缩能力。例如,壳聚糖在水中溶解后,在约32°C时从流体聚合物溶液转变为凝胶状态。基于PNIPAM的刷子也能可逆地响应温度变化,从而可通过调节温度来控制药物释放速率。
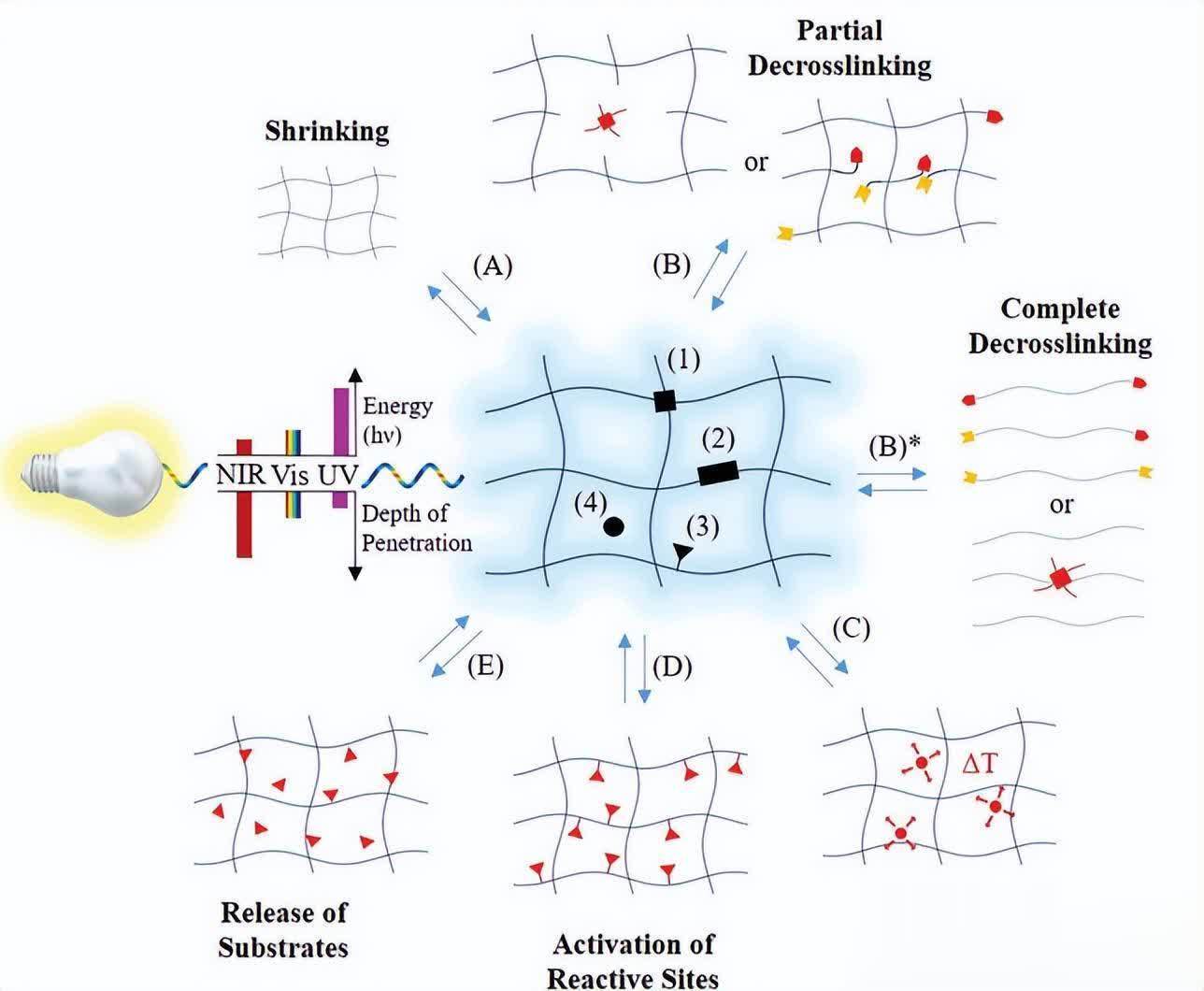
3、光响应性水凝胶
能够在光强、波长或方向改变时发生凝胶化或溶解。例如,一种改性的富马酰胺应用,可使材料从液态转变为凝胶态。利用光作为凝胶化的触发因素,可实现对过程的时空调节,增强功能响应的精度和可控性。
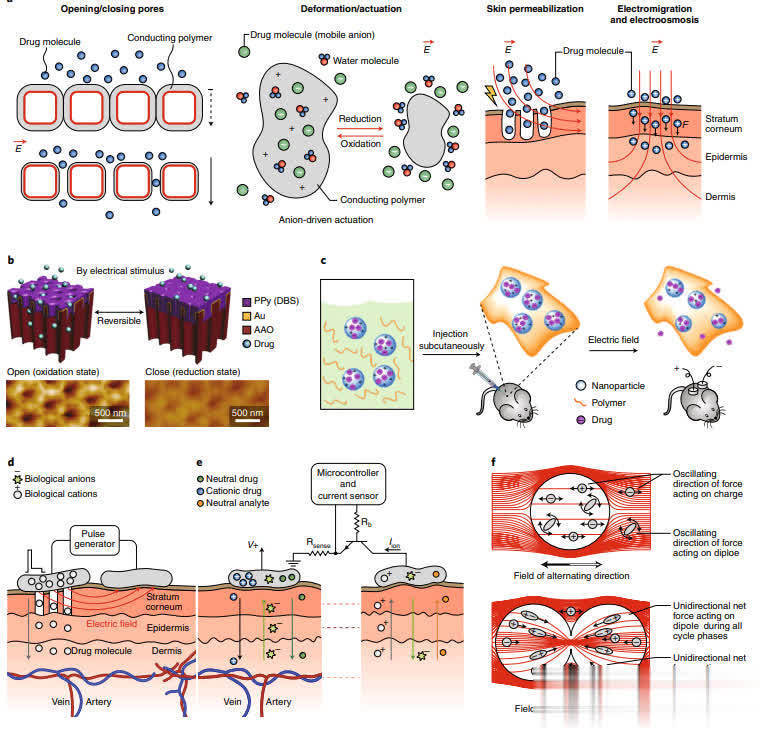
4、电响应性水凝胶
可以通过操纵电场强度和方向来调节其凝胶化和溶解过程。例如,当受到电场作用时,这些水凝胶能够溶解、收缩或弯曲,有效地将电能转化为机械能。这种特性使其在传感器技术、控释药物和智能材料开发等领域具有广泛应用。
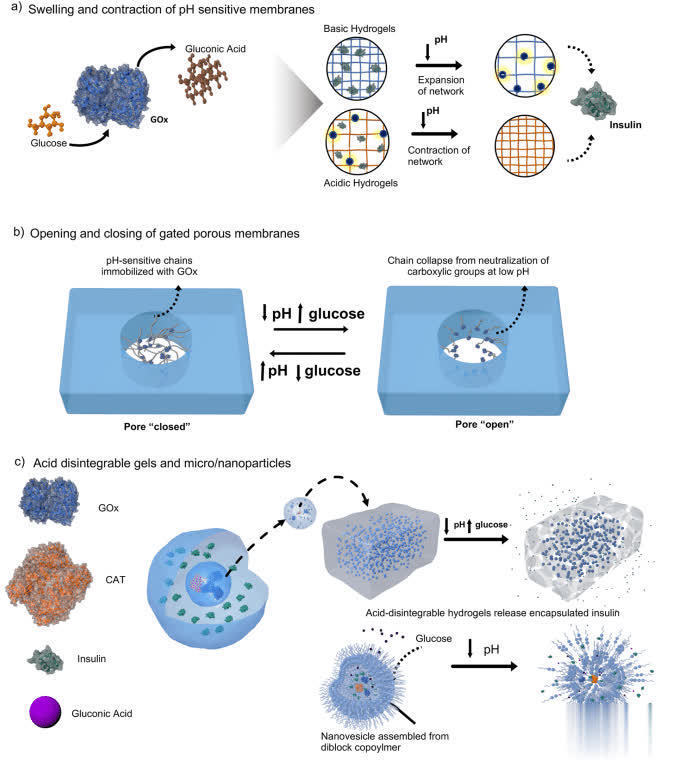
5、化学响应性水凝胶
对特定化学物质的存在或浓度变化敏感,会发生凝胶化或溶解反应。例如,可将葡萄糖响应元件整合到胰岛素或胰岛素输送系统中,促进生物活性释放,在控释药物等生物医学应用中具有潜在价值。
四、水凝胶微型机器人的制备方法
(一)微流控方法
微流控涉及在微流控芯片上的微尺度通道内操纵不相溶的流体,在通道交叉处形成液滴,随后将这些液滴交联产生水凝胶微球。
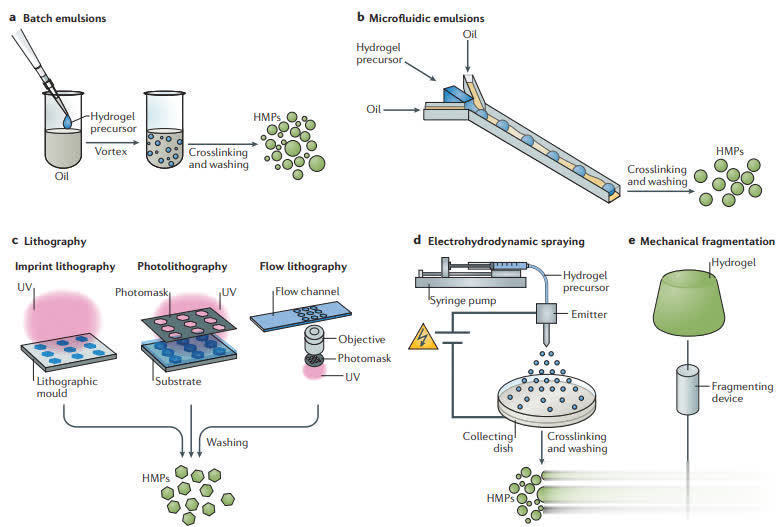
(二)乳化方法
乳化是将不相溶的液体(如水和油)混合,通过搅拌产生可交联的水凝胶液滴。例如,通过在壳聚糖和聚丙烯酰胺接枝瓜尔胶之间形成互穿聚合物网络来制造水凝胶微球,体现了乳化方法在合成复杂水凝胶结构方面的多功能性。
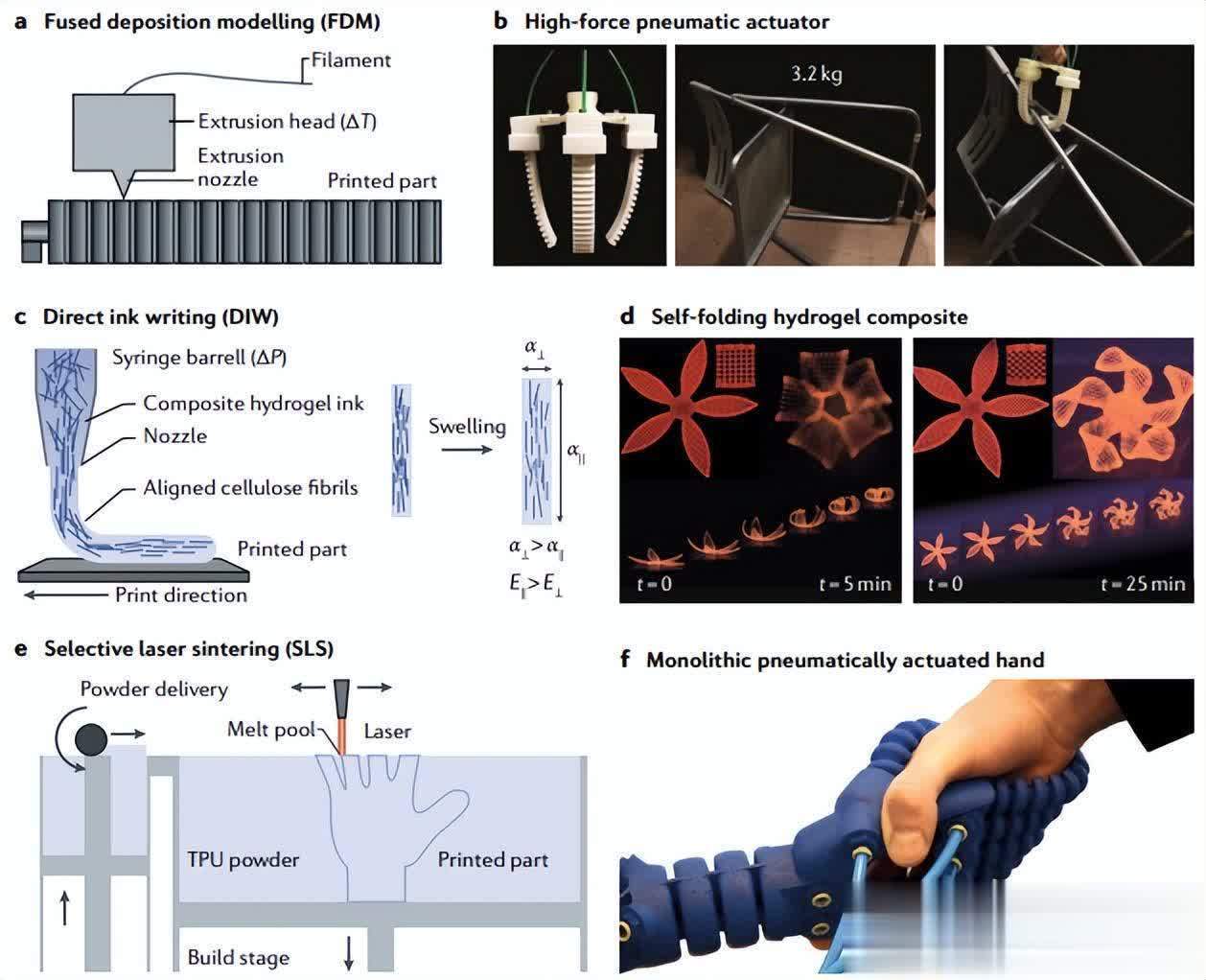
(三)3D打印
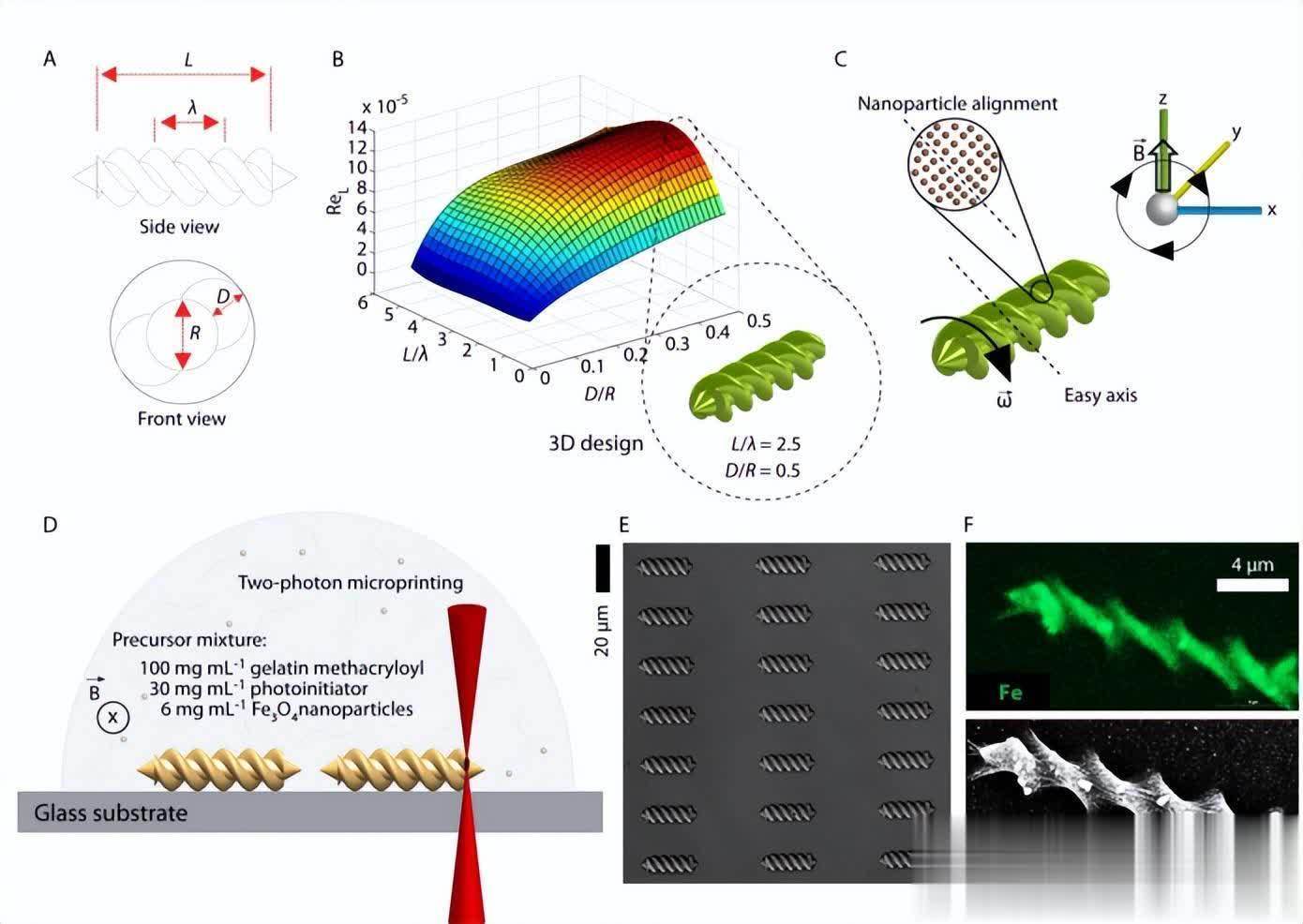
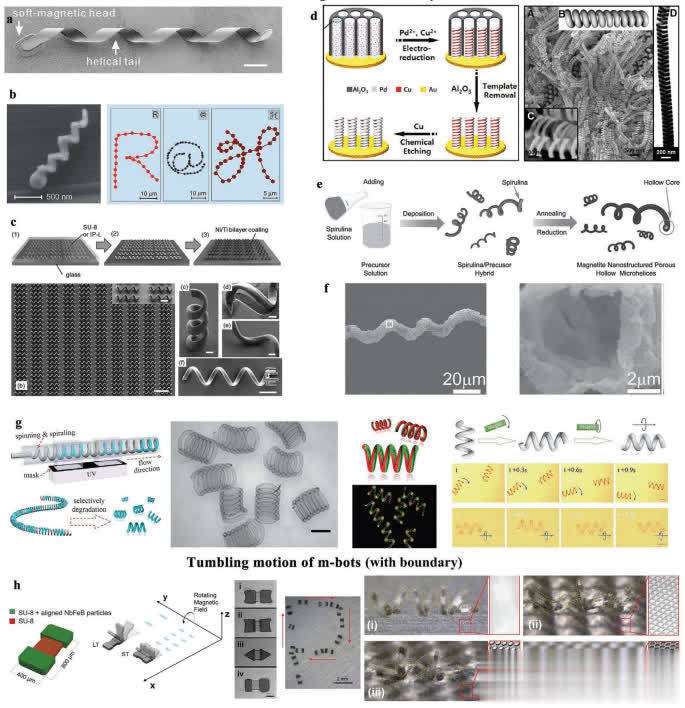
用于制造具有精细加工结构和复杂几何形状的微型水凝胶机器人。例如,基于双光子聚合(TPP)的3D打印技术可用于纳米级精度制造三维螺旋结构,赋予明胶甲基丙烯酸酯(GelMA)水凝胶机器人精确定义的属性和功能。
(四)光刻技术
光刻技术采用具有微米或纳米级分辨率的光掩模来制造精细结构。例如,聚二甲基硅氧烷(PDMS)、聚氨酯(PU)和聚酰亚胺等材料可作为构建机器人身体结构的模板,赋予机器人框架灵活性、可定制性和耐用性。
(五)电喷雾电离
电喷雾电离(ESI)是一种通过电位动力力驱动液体雾化的技术,借助静电力量和离子交联剂合成水凝胶微球。例如,通过调整实验参数,可以定制粒径,生产出直径从几微米到数千微米的均匀水凝胶微球。在这个过程中,凝胶溶液在高压下雾化成微小液滴,然后瞬间离子化,液滴内的材料发生交联或凝胶化反应,形成固体水凝胶微球。
五、水凝胶微型机器人的驱动方式
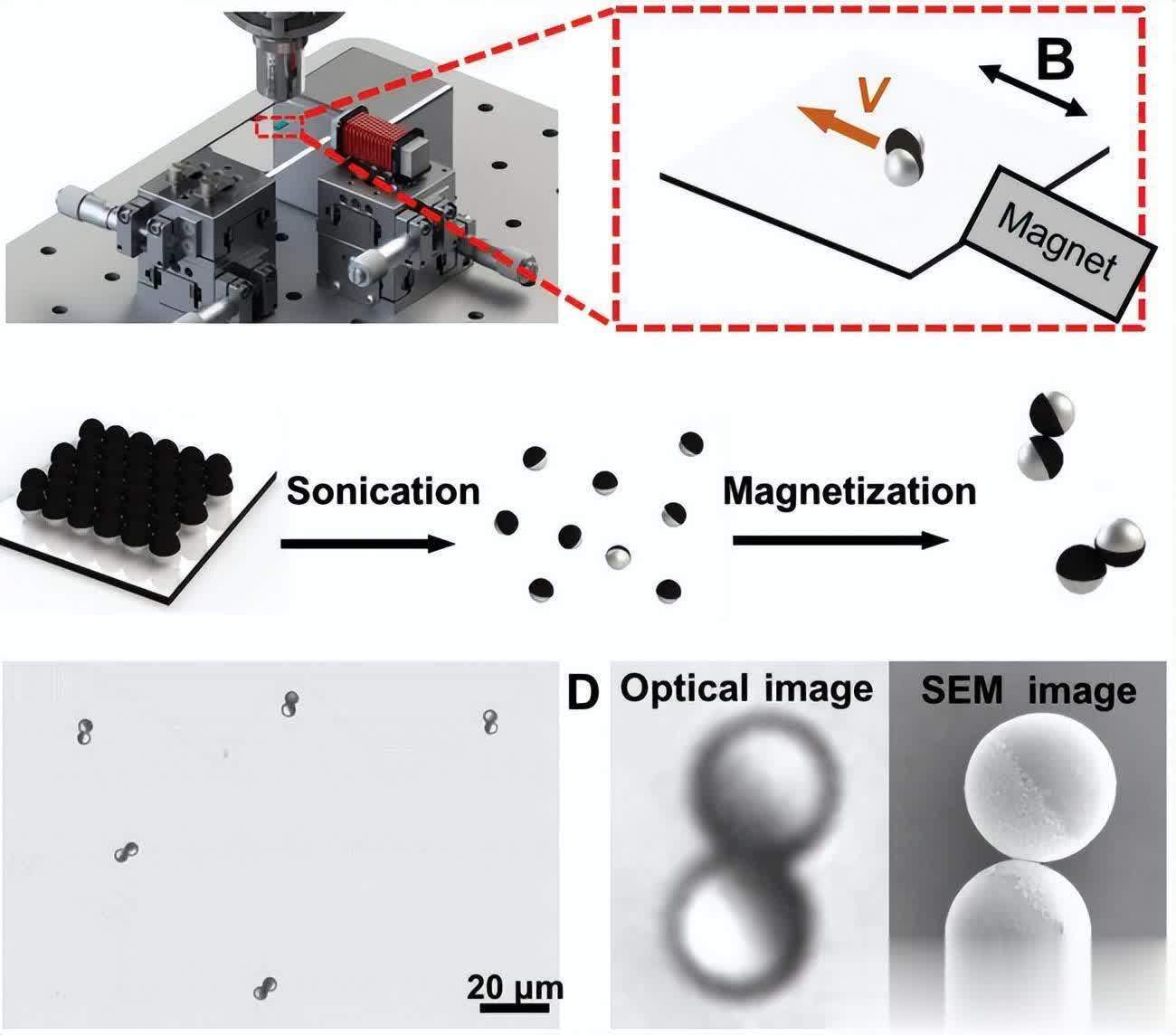
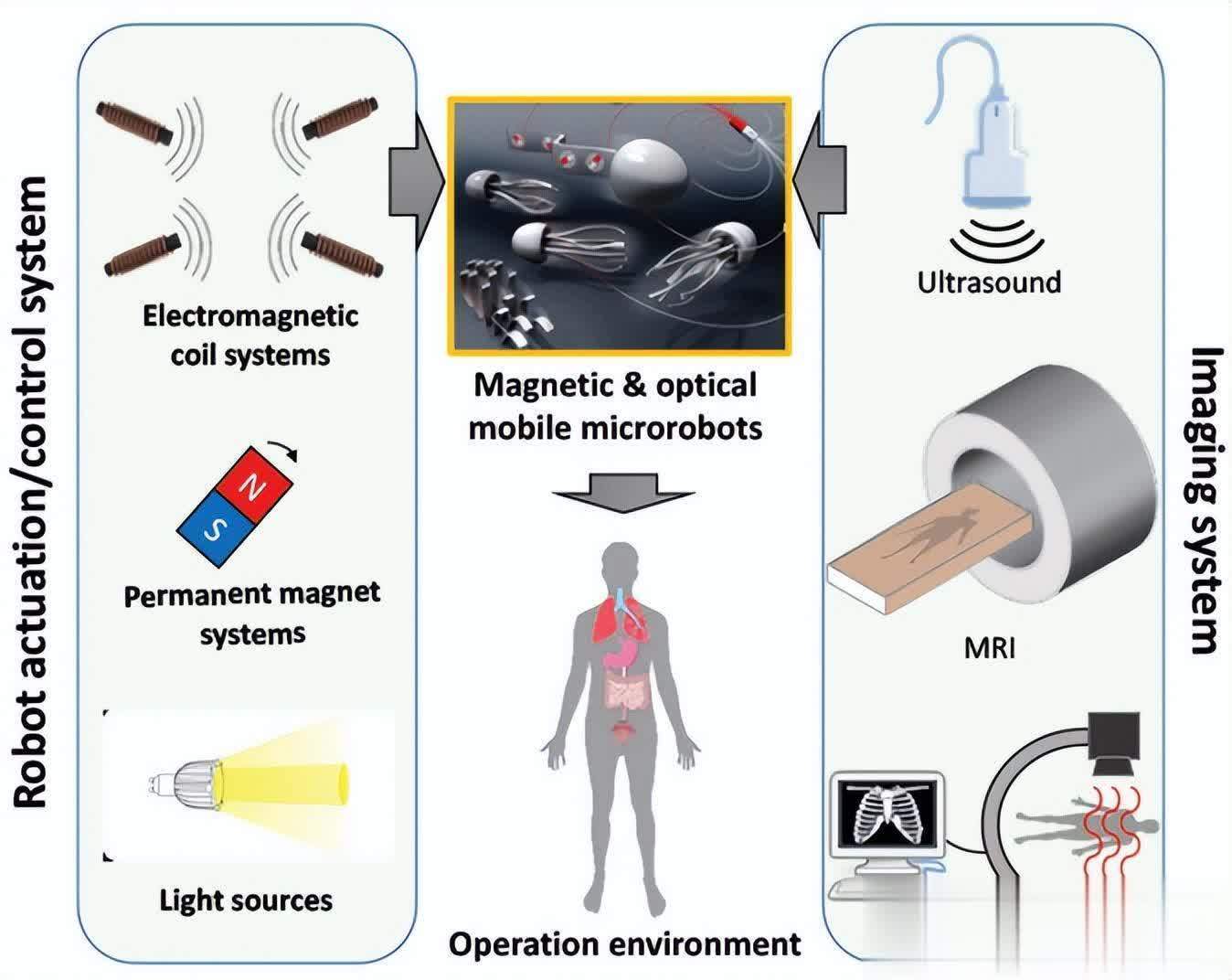
(一)磁驱动
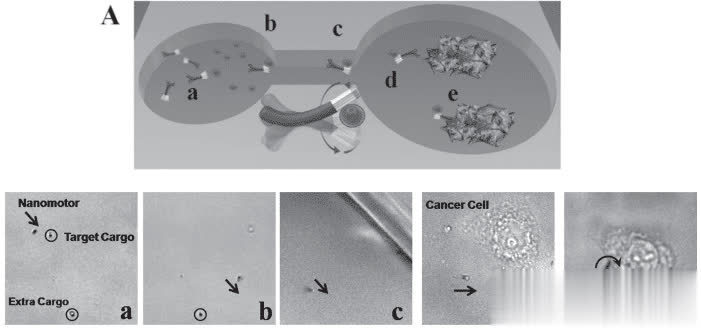
磁驱动在微型机器人领域具有很大的应用前景,例如,利用磁场驱动水凝胶基微型机器人末端执行器执行精确任务,如靶向、释放和采样等。研究还实现了在单个均匀振荡磁场中对多达四个柔性薄膜磁性微型机器人的完全独立和解耦控制。此外,对磁驱动微群体的研究也取得了进展,如利用激光散射对比成像实时跟踪血管内的磁性纳米机器人群体,实现其在血管内的引导导航。
(二)光驱动
光作为无线供电和控制移动微型设备的常用工具,也广泛用于驱动微型机器人。例如,光催化微型机器人利用外部光源和周围化学环境的能量实现高效推进。光响应性水凝胶可使微型机器人在光的作用下执行可逆和重复运动,实现无线遥控。
(三)电场驱动
电场驱动方法无需额外燃料源,主要利用直流或交流电场进行推进。例如,在水凝胶机器人外表面设置由金属纳米粒子组成的褶皱纳米膜电极,通过毛细管力组装并由溶剂化诱导,提高机器人对电场的性能和响应能力。
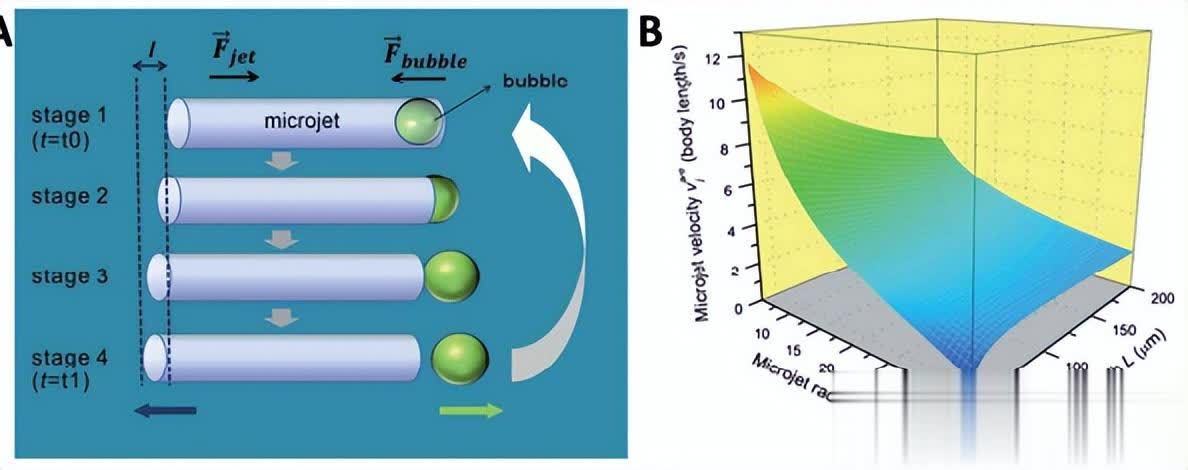
(四)化学驱动
化学驱动机制主要利用化学反应产生的局部浓度梯度、电位梯度以及气泡来推动微型机器人在流体环境中导航。
(五)温度驱动
基于温度响应性水凝胶的原理,将对温度敏感的材料集成到超分子纳米电机中,使其在一定温度范围内发生形态或性能变化,从而调节运动速度。例如,一些超分子纳米电机和温度响应性材料在精密控制货物运输方面具有潜在应用。
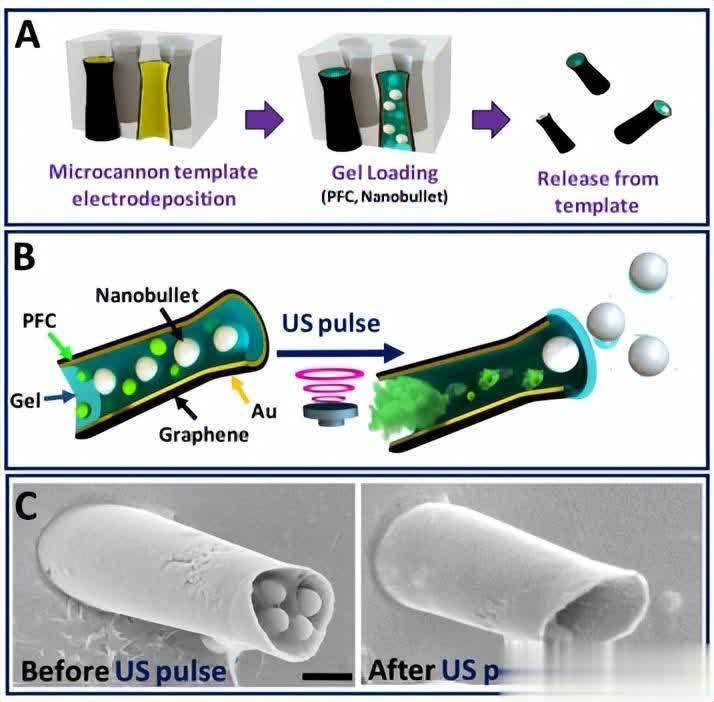
(六)超声驱动
超声驱动利用超声波精确控制和推动微型机器人,具有非侵入性、耐久性和生物相容性好的特点。例如,一种包含基于明胶的水凝胶基质的微型炮机器人,该基质中嵌入了全氟碳乳液和纳米子弹,通过超声激活组装。这种技术可实现深部组织穿透,携带并精确部署多个有效载荷,在医疗诊断、治疗输送和物流等领域具有应用潜力。
六、面临的挑战及未来发展方向
(一)挑战
1、多功能性
目前水凝胶微型机器人需要从单一功能设备向多功能设备发展,例如创建集成生物监测、药物输送和治疗干预等多种功能的水凝胶可穿戴设备,这需要对各种功能模块进行战略设计和整合。
2、可加工性
尽管水凝胶微型机器人的制备相对简单,但提高制备过程的控制和重复性仍是挑战,包括材料选择、结构控制和形态设计等方面,以确保机器人的一致性和稳定性,满足不同应用需求。
3、环境可持续性
水凝胶微型机器人虽具有生物相容性和降解性,但在设计和制备过程中应进一步优先使用可再生、可生物降解材料,并减少能源消耗和废物产生,以确保其环境可持续性。
4、可编程性
考虑到水凝胶微型机器人的灵活性和适应性,需要对其激活时的稳定性和精度进行控制。这意味着要通过外部信号或控制器对其操作进行精确控制,并具备实时反馈机制,以适应不同任务需求。
5、刺激选择性
由于水凝胶具有多种刺激响应特性,微型机器人需要能够区分并选择性地响应特定刺激,如温度、光或电场等,以实现精确运动、驱动和靶向操作。
6、驱动效率
水凝胶材料的柔软性和低密度导致能量转换效率低,推进效率不高,且当前的能量供应方法无法提供足够的动力,这对提高驱动效率、确保足够动力以及精确控制机器人运动构成了障碍。
(二)未来发展方向
为了推进水凝胶微型机器人的发展,需要在新材料和驱动技术领域进行广泛研究。开发具有更好稳定性、可控性和可扩展性的新型水凝胶材料,对于实现功能多样性和优化机器人性能至关重要。同时,增强驱动技术,如对磁控系统进行进一步研究和改进,以提高水凝胶微型机器人的能力,使其在医疗、环境和工业等领域得到更广泛的应用。
参考文献:
Song W, et al. Hydrogel microrobots for biomedical applications. Front Chem. 2024 May 22;12:1416314.